机器人xacro设计+gazebo/rviz启动
机器人xacro设计+gazebo/rviz启动
- 项目需求
- 方案
- 机器人的本体设计
- 机器人本体集成car_gazebo.xacro
- inertial惯性矩阵 head.xacro
- 小车底盘base.xacro
- 摄像头camera.xacro
- 雷达laser.xacro
- 机器joint关节控制器+传感器sensor设计
- 机器人joint关节控制器move.xacro
- 摄像头传感器camera_sensor.xacro
- 雷达传感器laser_sensor.xacro
- launch文件启动gazebo和rviz
- car_gazebo.launch
- car_rviz.launch
项目需求
创建一个机器人,包含本体、控制器、传感器。在gazebo物理引擎中加载真实世界模型,在rviz通过各种插件查看状态。
方案
首先,看一下整体的项目截图
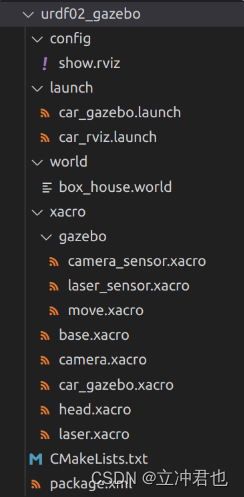
urdf02_gazebo功能包下面有/config文件夹放置rviz的配置文件,/launch文件夹放置启动文件,/world文件夹放置gazebo的物理世界模型,/xacro文件夹放机器人模型文件,分别在/xacro当前目录下放机器人本体的xacro文件,以及在/xacro/gazebo文件夹下放控制和传感器文件,最终所有的xacro文件都集成进/xacro/car_gazebo.xacro中,即car_gazebo.xacro集成了机器人本体、控制器、传感器,值得注意的是,xacro集成了这么多个不同的 xacro文件,其本质上是将所有的xacro文件复制到一块的,所以不同的xacro文件可写同一个name,反正最终都会复制集成到同一个xacro文件下,car_gazebo.xacro如下所示。
机器人的本体设计
机器人本体集成car_gazebo.xacro
其中第一个head.xacro是计算inertial惯性矩阵的,因为gazebo是需要考虑真实物理引擎的,所以head.xacro里封装了宏(相当于函数,包含函数名和参数),每个宏函数都是标准的物体,如球,圆柱等,传参传入质量,长宽高半径等,宏函数就会自动计算惯性矩阵,宏函数在机器人本体设计直接调用即可。
inertial惯性矩阵 head.xacro
以下是各个机器人本体连杆link的设计,包括小车底盘、摄像头、雷达,其中的inertial惯性矩阵用到了head.xacro的宏函数。
小车底盘base.xacro
Gazebo/Yellow Gazebo/Red Gazebo/Red 摄像头camera.xacro
Gazebo/Blue 雷达laser.xacro
Gazebo/White Gazebo/Black 以上是机器人本体的连杆link部件设计,那么小车还需要控制器还有上面的传感器真实引用,关于这部分内容我放在了/gazebo文件下。
机器joint关节控制器+传感器sensor设计
控制器也是通过xacro文件实现,小车动起来主要是通过joint关节传动,比如小车左轮与地盘连接的joint关节,控制关节转动即可,由于小车有两个驱动轮,所以joint驱动也封装成宏函数来实现。
机器人joint关节控制器move.xacro
transmission_interface/SimpleTransmission hardware_interface/VelocityJointInterface hardware_interface/VelocityJointInterface 1 Debug true / 1 true true 100.0 true left_wheel2base_link right_wheel2base_link ${base_link_radius * 2} ${wheel_radius * 2} 1 30 1.8 cmd_vel odom odom base_footprint 接下来是传感器的配置,因为机器人本体已经有了camera连杆和laser连杆,所以现在需要给这两个存在的连杆配上传感器,也就是将传感器映射到连杆中。引用方式是gazebo reference=“连杆名”,连杆名在机器人本体连杆文件中,保持一致。
摄像头传感器camera_sensor.xacro
30.0 1.3962634 1280 720 R8G8B8 0.02 300 gaussian 0.0 0.007 true 0.0 /camera image_raw camera_info camera 0.07 0.0 0.0 0.0 0.0 0.0 雷达传感器laser_sensor.xacro
0 0 0 0 0 0 true 5.5 360 1 -3 3 0.10 30.0 0.01 gaussian 0.0 0.01 /scan laser 好了,终于完成了机器人的整体设计了,现在机器人有了本体,还有了两轮差速控制器,还有了传感器。
接下来就让机器人通过launch文件启动gazebo和rviz中吧。
launch文件启动gazebo和rviz
分别通过launch来启动gazebo和rviz,有启动先后顺序的,因为car_gazebo.xacro先在car_gazebo.launch中加载到参数服务器中,所以要先启动car_gazebo.launch,并且在car_rviz.launch不需要加载car_gazebo.xacro文件,因为car_gazebo.launch已经将其加载参数服务器了。
car_gazebo.launch
car_rviz.launch
参考来源
【Autolabor初级教程】ROS机器人入门
URDF集成Gazebo