软件定义汽车的关键—车载操作系统
文章目录
- 前言
- 一、车载系统是什么?
- 二、车载系统在智能汽车中的应用
- 总结
前言
智能网联大环境变革情况下,软件定义汽车理念已成行业共识。
传统分布式E/E架构因如下原因:
- 计算能力不足(车规芯片);
- 通讯带宽不足(传统车载总线限制)、
- 不便于软件升级(现阶段解决方案是OTA)等瓶颈.
不能满足现阶段汽车发展的需求,E/E架构升级已成为智能网联汽车发展的关键。
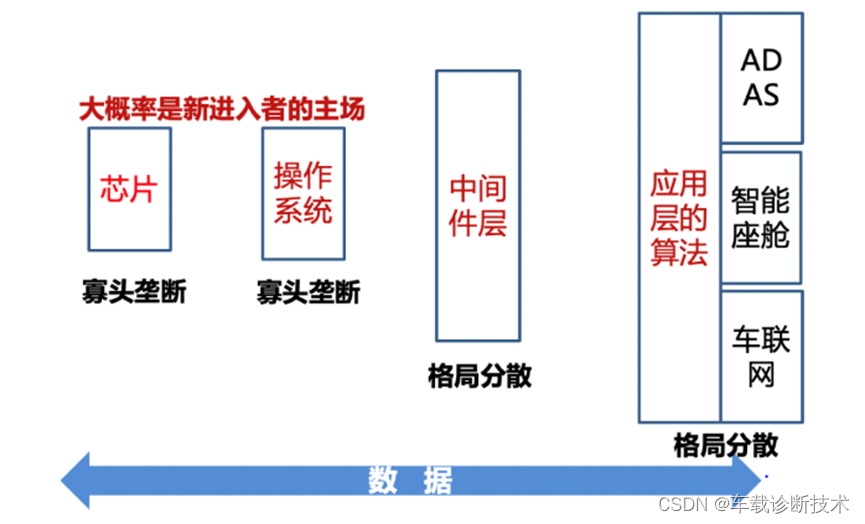
E/E架构主体包括:硬件、软件、通信架构,该系统升级涉及到(由下至上)芯片+操作系统+中间件+应用算法软件+数据构建核心技术闭环,在这其中车规级操作系统是软件定义汽车生态循环发展的灵魂

一、车载系统是什么?
由于5G/AI技术进步加上“特斯拉效应催化”带来的影响:
- 软件取代硬件定义汽车,E/E架构升级成为关键已是行业共识;
- 用户版L3级ADAS功能渗透率快速提升从而带来单车价值量上升;
- AI芯片决定算法生态,是未来汽车产业链的基石,发展先行,三强多极格局初步形成。
- 操作系统决定软件生态,是未来汽车产业链的灵魂。
在整个汽车发展进程中,车规底层OS格局较为稳定,主要有:
QNX(Blackberry);
Linux(开源基金会);
Andorid(Google)。
现阶段,随着无人驾驶功能在汽车中应用的晨读越来越深,有两个域在各个文章中也被提及:
座舱域;
自动驾驶域。
而对应这两个域的OS,侧重点也不一样;
座舱域OS侧重点在于应用和开发者生态,对功能安全、信息安全要求没有那么严苛,因此中控和仪表的APP应用和接口发展较丰富,国内多基于安卓/AliOS开发,国外多基于Linux开发。
自动驾驶域OS更加注重高实时、安全性,由于大部分车型仍未形成自动驾驶域,OS发展仍较早期,布局来看多基于Linux/QNX开发。
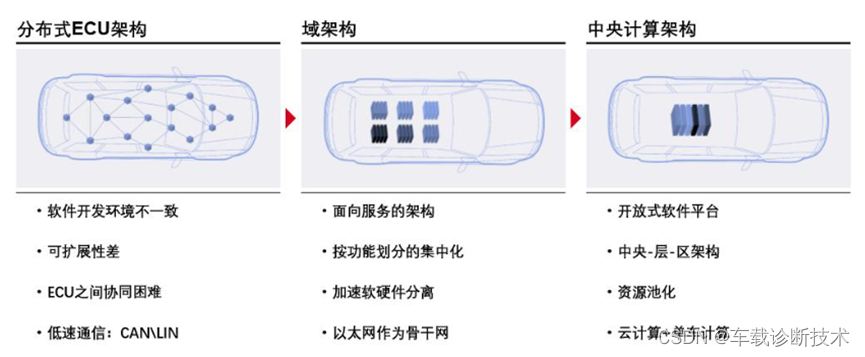
汽车E/E架构从传统的分布式向域控制-中央集中式(HPC)不断升级发展,域控制器的重要性日益凸显,而AI芯片则是自动驾驶域控制器/中央计算平台的核心。
座舱域的AI芯片主要为高通、英特尔、华为(麒麟)和瑞萨等,要求AI算力较小,安全等级较低;
自动驾驶域在AI算力和功能安全均远高于座舱芯片,因此AI芯片玩家主要为特斯拉(自研)、Mobileye、英伟达、华为和地平线等。
传统汽车因不同域之间要求的实时性、安全性、通信带宽不尽相同,传统汽车主机厂/Tier 1级供应商无法一步到位,因此多为跨域融合方案(即3个域或5个域等)。因此,随着域的逐渐形成,域操作系统将逐渐形成。
二、操作系统在智能汽车发展中的作用
操作系统(Operating System, OS)是指控制和管理整个芯片处理系统的硬件和软件资源,并合理地组织调度芯片计算的工作和资源,以提供给用户接口和环境的程序集合。所有智能设备发展到一定程度后,其运行环境都需要专门的OS:
- PC机——微软Windows系统;
- 智能手机——GoogleAndroid系统;
- 苹果 ——iOS系统。
在软件定义汽车的大趋势下,车载OS是传统汽车向智能汽车转变的关键。汽车操作系统是从传统汽车电子基础软件不断演变而来,未来汽车操作系统将主要分为自动驾驶OS和智能座舱OS两大类。
不同玩家基于自身需求,域划分个数不尽相同:
博世分为5个域(动力域、底盘域、座舱域、自动驾驶域、车身域);
大众MEB平台车型为3个域(自动驾驶域、智能座舱域、车身控制域);
华为同样也为3个域(自动驾驶域、智能座舱域、整车控制域)。
虽然有多个域(这里面也需要考虑到跨域融合),都有涉及开放、兼容性、生态的智能座舱域操作系统和注重实时、安全、稳定的自动驾驶域操作系统两大类型
2.1. 汽车广义OS包含系统和功能软件两大部分
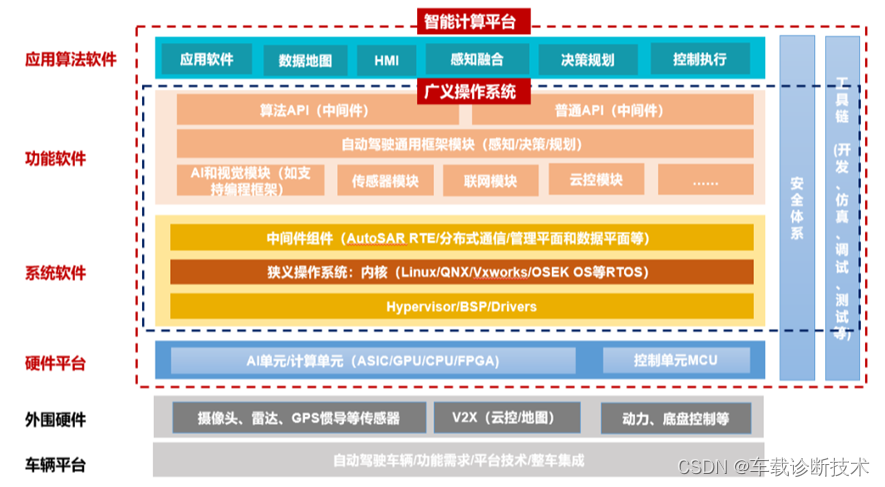
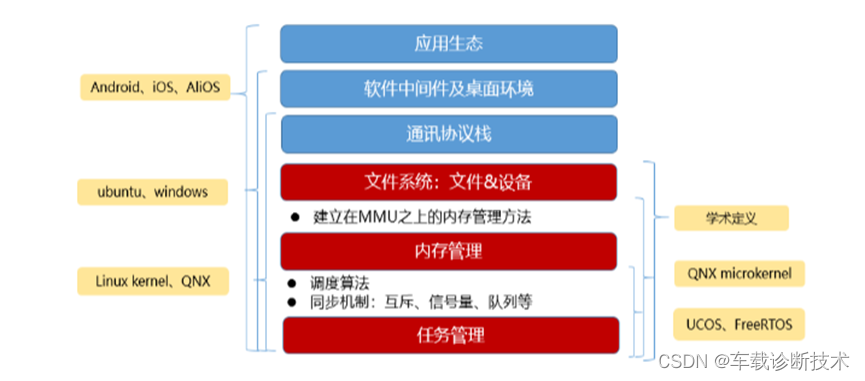
从软件层次来说,狭义的操作系统仅包含系统内核Kernel部分,是系统软件其中的一部分。而广义的操作系统则包含系统软件和功能软件。车载智能计算平台自下而上可大致划分如下四个部分:
- 硬件平台:基于异构分布式硬件架构包括AI 单元、计算控制单元,应支持芯片选型灵活、可配置拓展、算力可堆砌等优点。
- 系统软件:是基于车辆场景定制的复杂嵌入式系统运行环境,主要包含:
可在多平台移植的硬件抽象层;
负责管理系统的进程、内存、设备驱动程序、文件和网络系统的操作系统内核(Kernel);实现异构网络环境下软件互联和互操作等共性问题,提供标准接口、协议,具有较高的移植性中间件。
- 功能软件:实现数据融合、规控的算法编程框架。协同系统软件,通过自动驾驶通用框架、网联、云控等技术,实现车辆自动驾驶功能。
- 应用算法软件:即为实现具体自动驾驶功能、HMI交互、数据融合等算法软件。
如下是典型自驾平台示意图:
汽车OS由基础软件程序-简单嵌入式-复杂OS不断升级。早期嵌入式开发直接在裸机上写程序,无OS(程序Task可通过轮询来调度任务)。随着软件越来越复杂,为了实现多任务执行,裸机程序不得不引入中断,而使程序结构复杂难以阅读和维护,因此嵌入式OS逐渐形成。
现阶段,科技互联网公司将重点放在定制型OS,大部分车企聚焦于ROM型。操作系统的改造分为:
- 基础型OS:完全独立研发的OS内核例如Linux、QNX等,因成本花费过高或不会出现全新操作系统;
- 定制型OS:在基于Linux、QNX内核深度定制化开发,如修改内核、驱动、运行时环境、应用程序框架等(华为鸿蒙OS、AliOS、VW.OS、特斯拉Version、Google车载Android);
- ROM型OS:基于Linux或Android等进行有限的定制化开发,不涉及内核更改,一般只修改操作系统自带的应用程序等。
总结
以上信息从网络搜集,仅供自学参考,让自己对汽车电子行业发展有一个明朗的认知。